考虑排队长度的信号交叉口生态驾驶轨迹优化
论文题目:考虑排队长度的信号交叉口生态驾驶轨迹优化
论文作者:黄意然,宋国华,彭 飞,黄健畅,张泽禹
论文期刊:交通运输工程与信息学报
网址:https://kns.cnki.net/kcms/detail/detail.aspx?doi=10.19961/j.cnki.1672-4747.2021.11.011
关键词:智能交通;生态驾驶;轨迹优化;信号交叉口;交通仿真
1摘要
为避免车辆在信号交叉口频繁地启停和加减速,减少车辆通过信号交叉口的能耗和排放,本文提出了一种考虑排队长度的信号交叉口生态驾驶轨迹优化模型。首先,基于构建的交叉口场景提出了“单次踏板”生态驾驶行为的定义和基本原则。其次,考虑交叉口交通信号和排队信息,将生态驾驶行为分类为“加速-滑行”“减速-滑行”和“匀速-滑行”三种驾驶模式,并构建了相应的数学模型。最后,设计数值仿真实验分析了不同场景参数对目标车辆的 CO2 排放和驾驶员操作容错性的影响。结果表明:(1)本文提出的“单次踏板”生态驾驶行为可以适应交叉口不同的场景特征,进而得到了异质性最优驾驶计划。(2)基于可接受加速度区间的设置,能够限制一定范围的驾驶员操作容错性。(3)与常规驾驶计划相比,“单次踏板”生态驾驶行为下的最优驾驶计划可以减少频繁的加减速,实现更为平稳的驾驶轨迹,能够减少超过2%的行程时间和20%的CO2排放。因此,本文提出的生态驾驶模型具有操作简单、鲁棒性强等特点,能够实现生态驾驶,达到节能减排的目的。
2引言
基于V2I(Vehicle-to-Infrastructure)技术的生态驾驶(Eco-driving)策略可以为到达信号交叉口的驾驶员提前预告信号相位、配时(Signal Phase and Timing,SPaT)信息和排队信息,改变不良驾驶行为,避免急加速、急减速或者长时间怠速等,从而优化车辆轨迹,减少不必要的能耗和排放。目前一些导航软件在部分城市最新上线了“红绿灯倒计时”功能,通过显示剩余变灯秒数避免驾驶员的紧急刹车行为,该设计为考虑信号的交叉口生态驾驶轨迹优化提供了强有力的现实支撑。目前信号交叉口的生态驾驶策略研究还存在一定不足:
采用大量智能算法,实时计算效率不高。
驾驶建议操作复杂,人工驾驶车辆难以实现。
车辆到达信号交叉口的场景设置和仿真情景还有待完善。
因此,本文构建考虑不同排队长度的信号交叉口场景,尝试为到达交叉口的车辆提供简单易于操作且具有一定驾驶员操作容错性的“单次踏板”生态驾驶行为,拟将行为分类识别为不同模式以适应场景特征的变化,并构建相应的数学模型,通过数值仿真并结合基于比功率分布的交通排放模型测算目标车辆CO2排放,进而评价模型生态效果。
3信号交叉口场景构建
由若干辆普通车组成的车队正在或准备排队离开交叉口,车队尾车(前车)后方有一辆可接收V2I通信的车辆(后车)正靠近交叉口。轨迹优化的目标车辆为后车,范围为后车从驶入交叉口上游至到达交叉口的过程,主要影响参数为前后车初始速度和初始间距。
基于V2I技术后车获取交叉口信号和排队信息并接受驾驶建议,不考虑换道行为和其他交叉口的影响,忽略坡度对车辆影响,所有车型一致。根据信号配时和排队信息,该交叉口场景分为两类:
绿灯场景:当前信号为绿灯,后车逐渐靠近交叉口而前方车队正在离开交叉口。
红灯场景:当前信号为红灯且即将结束,后车逐渐靠近交叉口而前方车队正在上游等待且准备离开交叉口;当信号转为绿灯时,车队开始启动并离开交叉口,情况与绿灯场景一致。
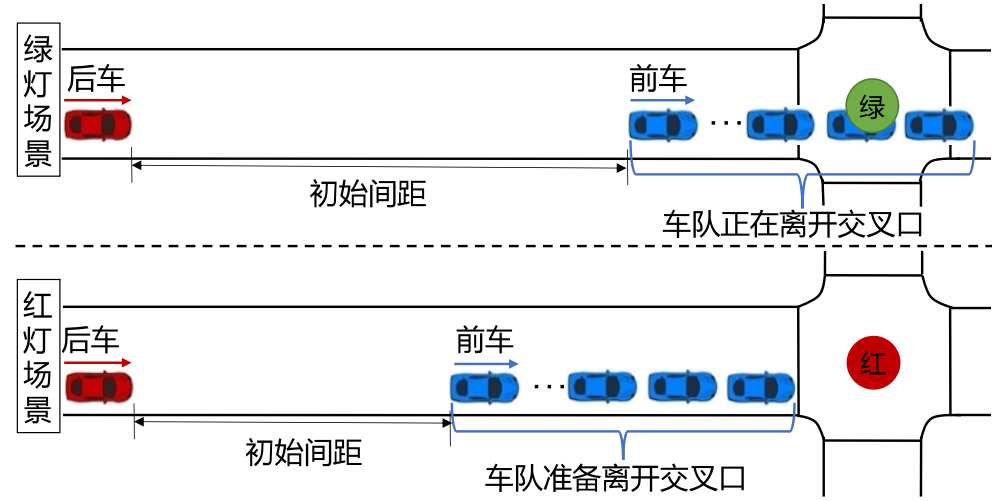
图 1 信号交叉口场景
4生态驾驶行为模型构建
4.1“单次踏板”生态驾驶行为
本文利用车辆滑行,提出了“单次踏板”的生态驾驶行为,该行为旨在减少后车踩加速踏板或制动踏板的次数来降低速度曲线的反复波动,且使后车尽快跟上前方车队通过交叉口,以缓解交叉口拥堵。
行为的基本原则具体如下:
(1)仅踩过一次踏板,后车就可以加入前方车队,然后一起通过交叉口;
(2)在踩下踏板达到一定速度后,后车释放踏板开始滑行,直至加入前方车队;
(3)后车需要在红灯结束后加入前方车队,并在绿灯结束前到达交叉口。
基于不同场景参数(前后车初始速度、两车初始间距),将后车驾驶行为识别为三种模式:①加速-滑行:先加速再滑行;②减速-滑行:先减速再滑行;③匀速-滑行:保持匀速再滑行。
根据基本原则,“单次踏板”生态驾驶行为控制流程:
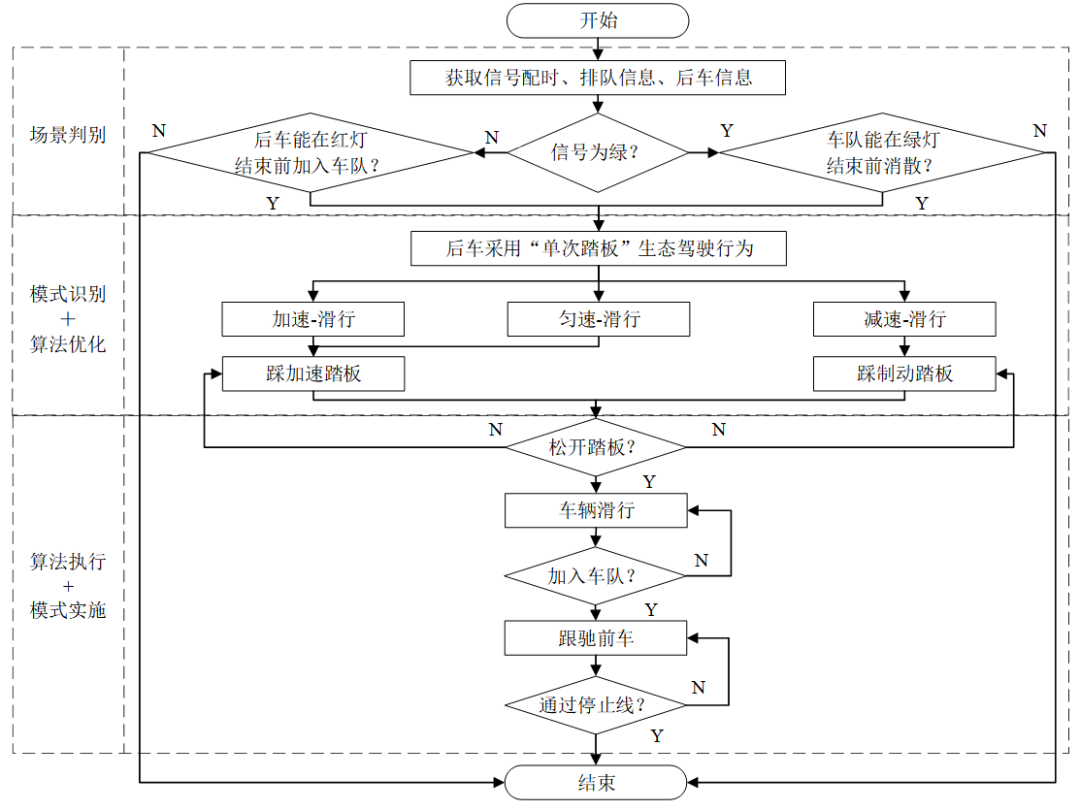
图 2 “单次踏板”生态驾驶行为控制流程图
4.2生态驾驶行为建模
根据行为控制流程将图2的场景分为三个阶段:初始阶段、滑行阶段和加入车队阶段。如图3所示,并对各阶段进行数学建模。
图 3 生态驾驶行为模型构建分阶段示意图
4.2.1初始阶段
初始时刻t=0,前车以初始速度vA0跟随车队,后车以初始速度vB0进入交叉口上游,前后车初始间距为d0。获取当前信号配时和排队信息将生态驾驶行为分类识别为加速-滑行、减速-滑行和匀速-滑行三种模式,驾驶情况分别为加速、减速和匀速,然后为后车提供相应的在[amin,amax]范围内的初始阶段加速度aB0。当t=ta-τB时,后车得到“释放踏板”的驾驶建议,将在τB后做出反应。
4.2.2滑行阶段
当t=ta时,后车释放加速或制动踏板然后开始滑行,此时后车速度应小于最大速度,假定最大速度即为期望速度vm。不考虑道路坡度,后车的总牵引力为:
|
| (1) |
式中:FB是总牵引力(N);A是轮胎和附件负载的滚动阻力以及来自刹车片和车轮轴承的阻力(N);B为动摩擦系数(N·s/m);C为空气阻力阻滞系数(N·s2/m2);M为车辆实际质量(kg);δ为质量修正参数,取常数1.04。
自动挡车辆带挡滑行时发动机牵引力接近零,效果与空挡滑行相近。为简化处理,假定当后车滑行时牵引力F为零,得到滑行时车辆加速度和速度的关系:
|
| (2) |
经过变换,可以得到滑行初始速度为vB1时,后车速度与滑行时间的关系:
|
| (3) |
当t=tj-τB时,后车得到“加入车队”的驾驶建议,将在τB后做出反应。
4.2.3加入车队阶段
当t=tj时,后车正好在红灯结束后且到达交叉口前加入车队,即tj应大于剩余红灯时间tr,后车位移xB小于交叉口上游长度du。此时前车和后车的位移:
|
| (4) |
|
| (5) |
加入车队时前车和后车的位移差∆d:
|
| (6) |
本文采用Newell模型描述车辆之间的跟驰行为。根据Newell模型中车头间距和速度的线性关系得到此时位移差∆d应满足:
|
| (7) |
当t=te时,后车到达交叉口,根据生态驾驶行为的第三条基本原则,整个过程的行程时间te应小于剩余绿灯时间tg。
根据数学模型,加速-滑行、减速-滑行和匀速-滑行模式的轨迹示意图如图4所示,蓝色虚线表示前车轨迹,红色实线表示后车轨迹。
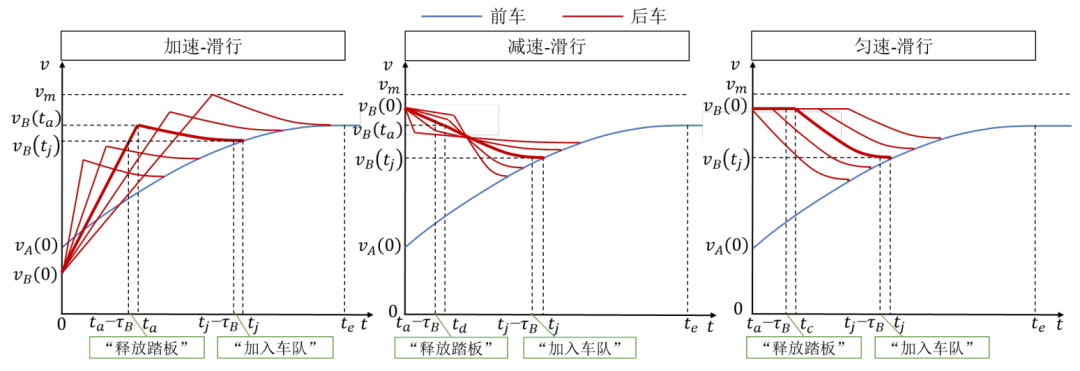
图 4 三种模式的轨迹示意图
5仿真实验及生态效果评价
5.1模型参数标定
以剩余绿灯时间tg为60s和交叉口上游长度du为300m的场景为例,设置不同的场景参数:1)前车初始速度vA0;2)后车初始速度vB0;3)初始间距d0,同时在区间[amin,amax]内以0.02m/s2为间隔划分初始阶段的加速度aB0,进而刻画不同情景下的前后车时空轨迹。
基于采集的轻型车逐秒轨迹数据,构建加速度-速度特征库,提供后车最大加速度amax取值,同时提取出交叉口轨迹数据并拟合出一条典型排队通过交叉口的轨迹作为前车轨迹。最小加速度 amin为-3m/s2,期望速度vm为60km/h。反应时间τB为1s,最小安全距离δB为7.26m。滑行模型参数取值:A=181.4N,B=2.42N·s/m,C=0.62N·s2/m2,M=2190.85kg。
仿真实验步长∆t为0.1s,假定当后车加入车队时前后车速度差∆v无限逼近于0.5m/s。
5.2最优驾驶计划
选取基于比功率(Vehicle Specific Power,VSP)分布的排放模型测算每次仿真轨迹车辆的CO2排放。本文定义后车CO2排放最低的加速度方案对应的行驶轨迹为最优驾驶计划。三类模式的最优驾驶计划的CO2排放与场景特征的关系:
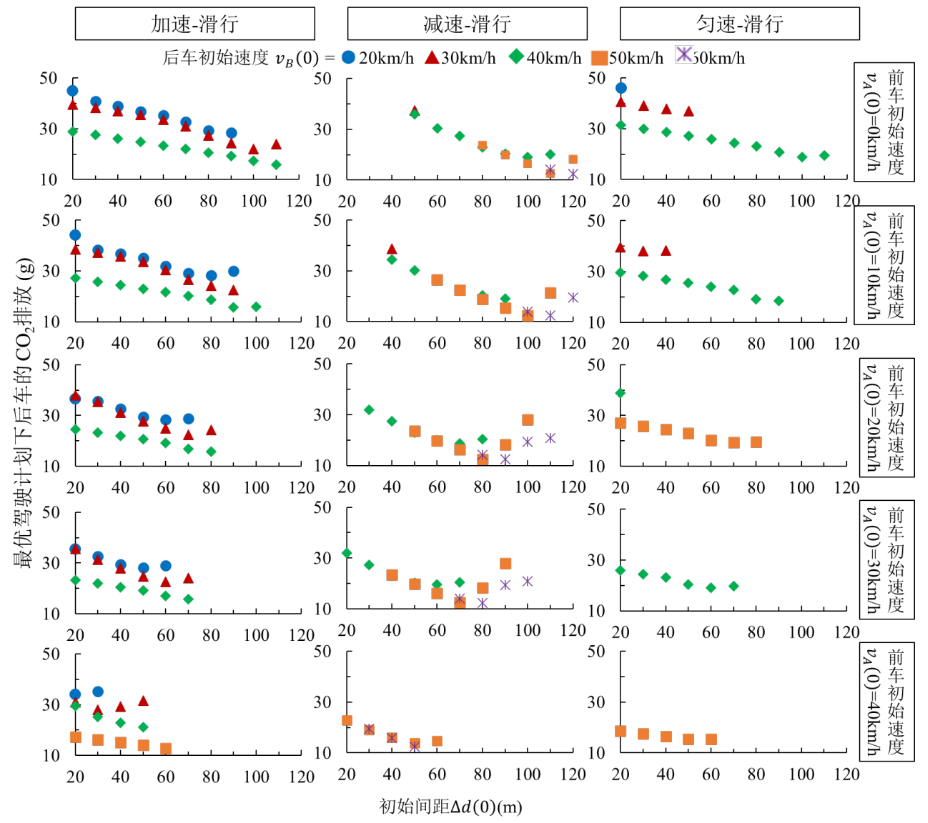
图 5 最优驾驶计划的CO2排放与场景特征关系
5.3驾驶员操作容错性
研究设置可接受加速度区间为[aB0-0.5,aB0+0.5]m/s2以分析场景参数对最优驾驶计划的驾驶员操作容错性的影响。面向CO2排放值定义驾驶员操作容错性ω,即为可接受加速度区间内最高CO2排放高于最优驾驶计划的CO2排放的比例:
|
| (8) |
式中:Emax为可接受加速度区间内的最高CO2排放;Emin为最优驾驶计划的CO2排放。ω越低,驾驶员操作容错性越高,驾驶员更容易遵循该驾驶行为以达到生态驾驶。实际应用时,可限定ω范围以确保一定的驾驶员操作容错性。
选取前车初始速度0km/h和后车初始速度20km/h的加速-滑行模式,前车初始速度0km/h和后车初始速度40km/h的减速-滑行模式,得到两类模式下初始阶段加速度、初始间距和CO2排放的关系:
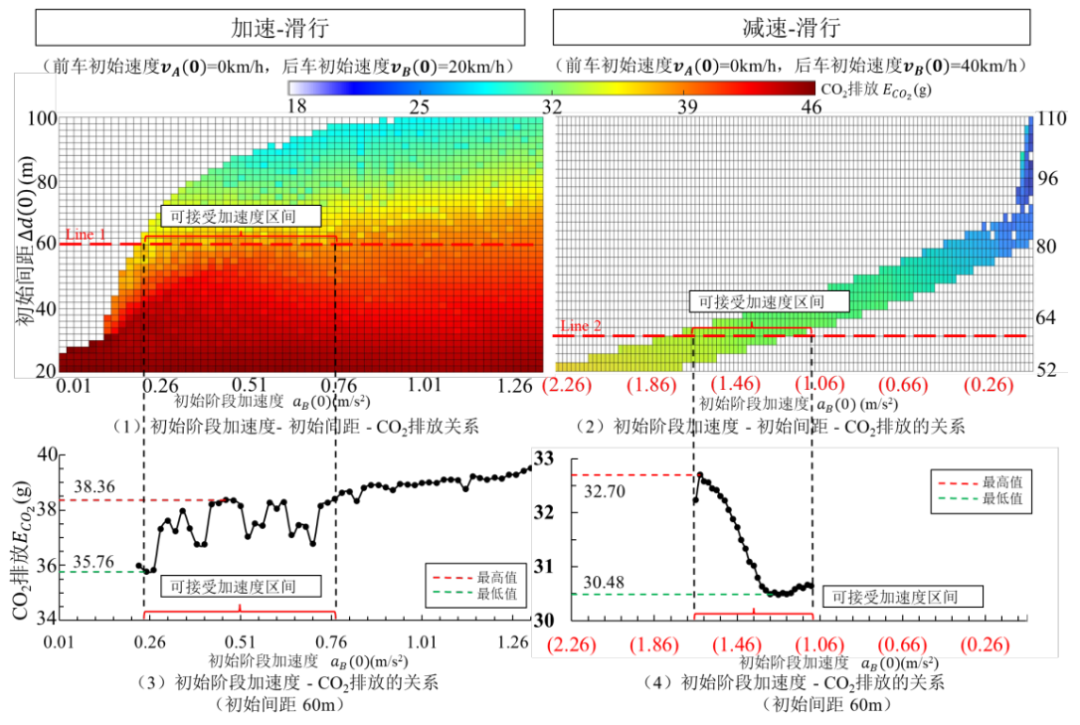
图 6 最优驾驶计划的CO2排放与场景特征关系
同时得到不同初始间距下的驾驶员操作容错性变化情况,均不高于17%,说明最优驾驶计划具有一定的驾驶员操作容错性。
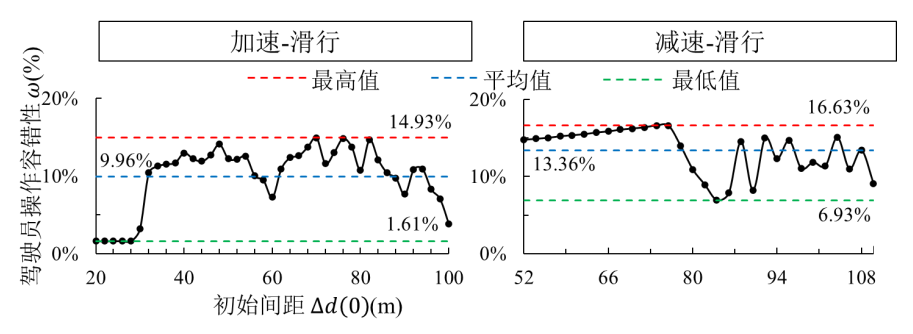
图 7 不同初始间距下的驾驶员操作容错性变化情况
5.4模型生态效果评价
基于加速度-速度特征库,研究通过蒙特卡洛(Monte Carlo)方法随机抽取当前速度对应的加速度,形成常规驾驶计划轨迹:驾驶员不知道前方信号和排队信息情况,当与前车间距较大时,驾驶员会以舒适加速度逐渐加速到期望速度,加速度随速度增加而减小;当与前车间距不足时,驾驶员难以预估准确间距进而产生反复的加减速,导致波动的速度曲线。
采用最优驾驶计划时后车的驾驶轨迹明显比常规驾驶计划平滑,且后车可以更快跟上前方车队。
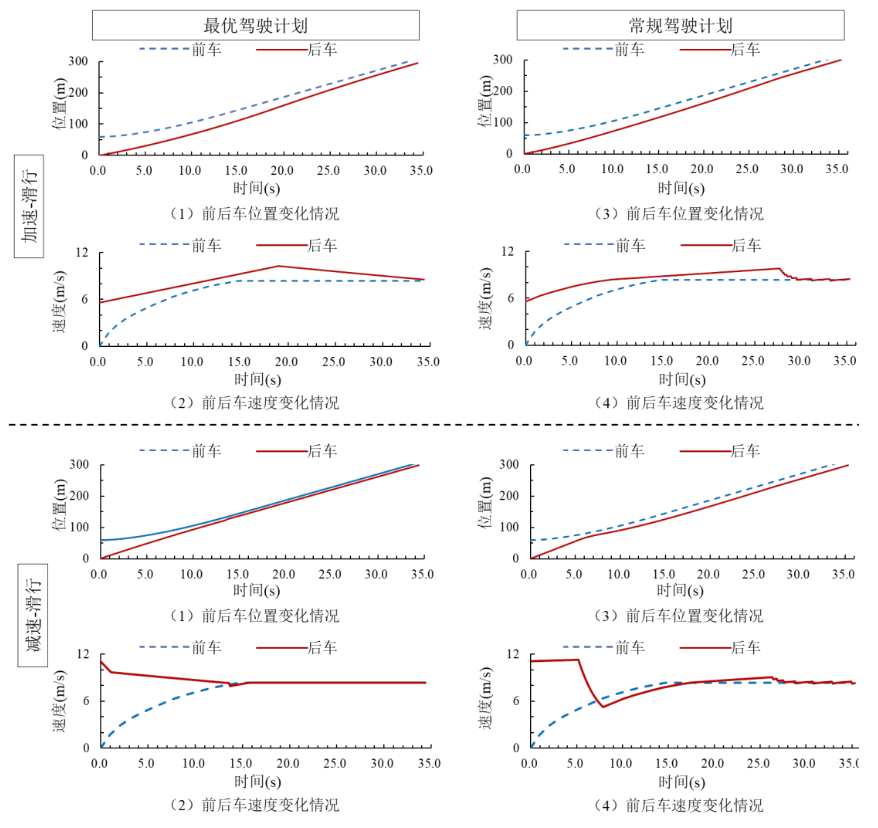
图 8 最优驾驶计划的驾驶轨迹优化效果
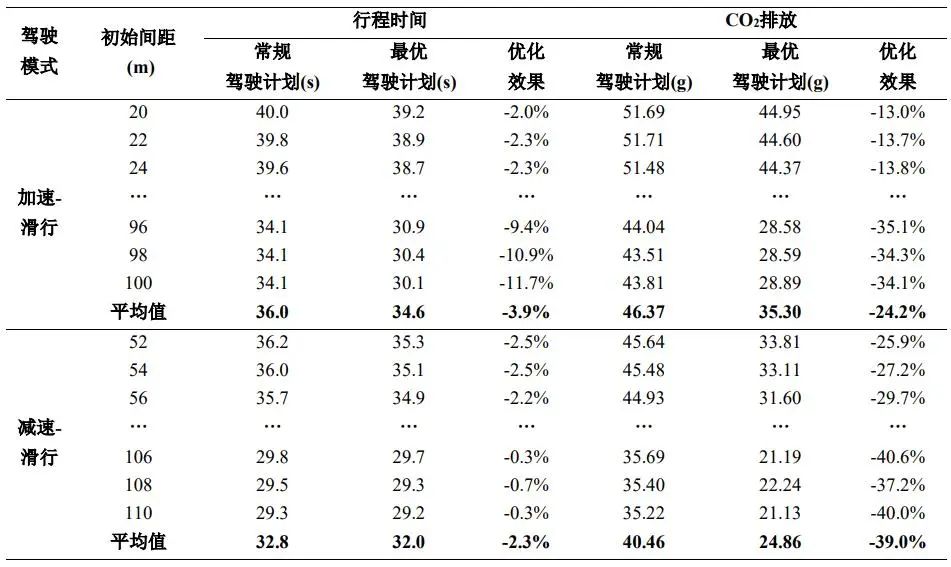
与常规驾驶计划相比,在加速-滑行和减速-滑行模式下后车分别可以减少平均3.9%和2.3%的行程时间,以及平均24.2%和39.0%的CO2排放。除减速-滑行模式的行程时间外,随着初始间距增加,最优驾驶计划的优化效果更加明显。
表 1 最优驾驶计划生态效果评价
6研究结论
与常规驾驶计划相比,最优驾驶计划能够改善车辆到达交叉口的驾驶行为,优化驾驶轨迹,减少超过2%的行程时间和20%CO2的排放。最优驾驶计划可操作性较强。研究设置可接受加速度区间计算得到不同间距下最优驾驶计划的驾驶员操作容错性均不高于17%。随着V2I技术的推广应用,生态驾驶行为可以应用于手机导航软件或交互设备中以优化到达信号交叉口车辆驾驶轨迹,减少交叉口拥堵和CO2排放,同时通过设置可接受加速度区间,可以达到一定范围的驾驶员操作容错性。
7部分参考文献
1] 杨晓光, 赵靖, 马万经, 等 . 信号控制交叉口通行能力计算方法研究综述[J]. 中国公路学报, 2014, 27(5): 148-157.
[2] 李晨旭 . 基于行驶轨迹的城市机动车排放热点区域污染物时空分布研究[D]. 北京: 北京交通大学, 2020.
[3] SHARMA N, KUMAR P P, DHYANI R, et al. Idling fuelconsumption and emissions of air pollutants at selectedsignalized intersections in Delhi[J]. Journal of CleanerProduction, 2019, 212: 8-21.
[4] 陈许冬, 李铁柱, 胡鸿飞 . 南京市轻型车不同工况下污染物排放分析[J]. 交通运输工程与信息学报, 2019, 17(1): 101-109.
[5] 吴颢, 焦钰博, 彭其渊 . 基于 ARRB 模型的交叉口多目标 信 号 配 时 优 化 研 究 [J]. 交 通 运 输 工 程 与 信 息 学 报 ,2020, 18(2): 139-147.
[6] 杨澜, 赵祥模, 吴国垣, 等 . 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72.
[7] 中国新闻网 . 百度地图推出红绿灯倒计时, 北京、长沙、保定、郑州 4 城上线[EB/OL].(2021-10-01)[2021-11-6].https://baijiahao. baidu. com/s?id=16793285371343 79112&wfr=spider&for=pc.
[8] SHI J, QIAO F, LI Q, et al. Application and Evaluation ofthe reinforcement learning approach to eco-driving at in-tersections under infrastructure-to-vehicle communica-tions[J]. Transportation Research Record, 2018, 2672(25): 89-98.
来源:北交CJSRC
供稿:黄意然
