2025交通科技与产业创新大会“自主式交通系统安全保障技术论坛”成功举办
6月14日上午,2025交通科技与产业创新大会“自主式交通系统安全保障技术论坛”在江苏苏州成功举办。
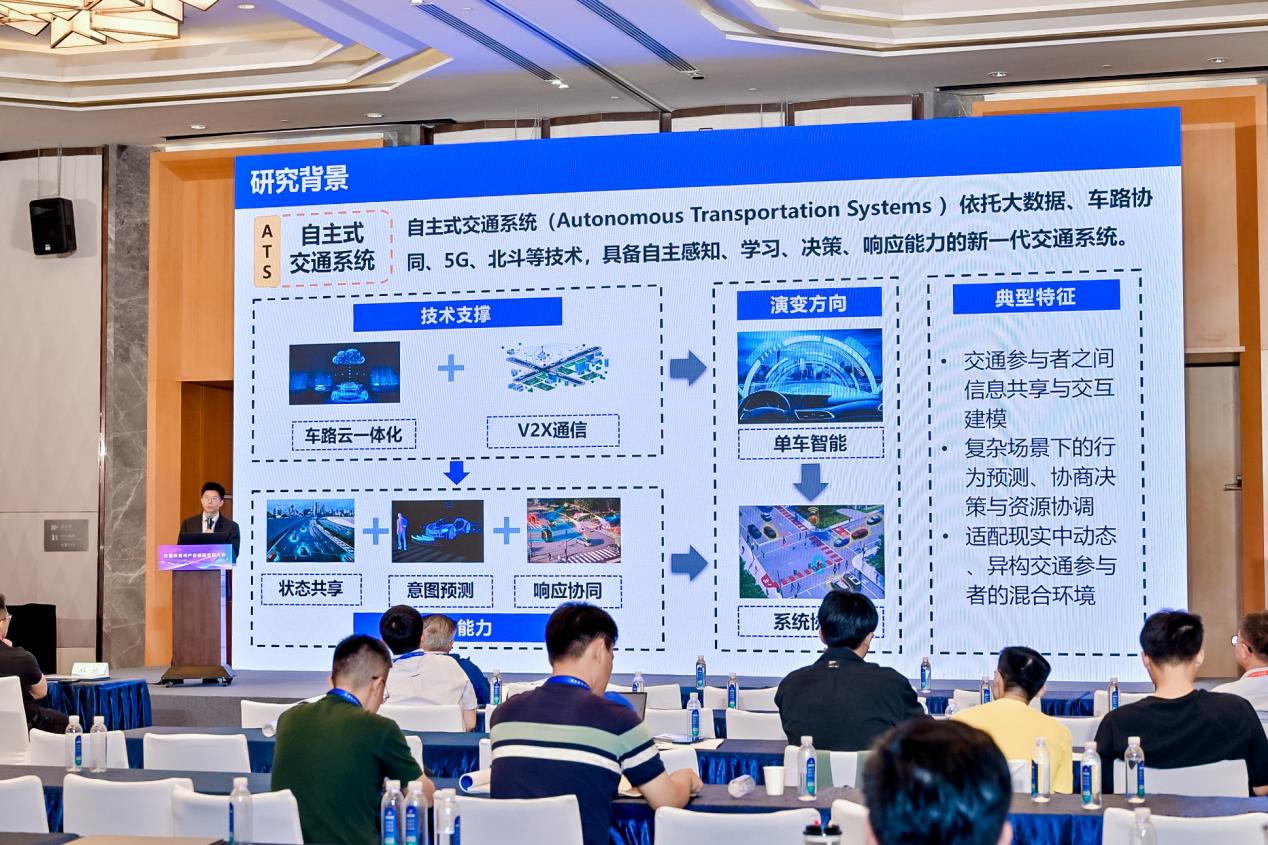
为深化自主式交通系统关键技术创新发展,提升我国自主式交通系统的安全保障能力,由世界交通运输大会运输规划学部主办、综合交通运输大数据应用技术交通运输行业重点实验室(北京交通大学)承办“自主式交通系统安全保障技术论坛”。本次论坛汇聚行业智慧,共研自主式交通系统风险识别、主动防控与系统建模等核心技术难题。

本论坛由北京交通大学交通运输学院教授、国际教育学院院长、WTC运输规划学部主席、实验室主任姚恩建主持,邀请到公安部道路交通安全研究中心戴帅副主任、中山大学智能工程学院院长蔡铭教授、同济大学孙剑教授、东南大学-蒙纳士大学苏州联合研究生院郑楠教授、公安部道路交通安全研究中心赵光明研究员以及北京交通大学陈荣升博士六位专家。各位专家立足不同研究视角,系统阐述了自主式交通系统安全保障领域的最新研究成果与实践经验,为我国自主式交通系统的高质量发展提供了多元化的理论支撑和创新思路。

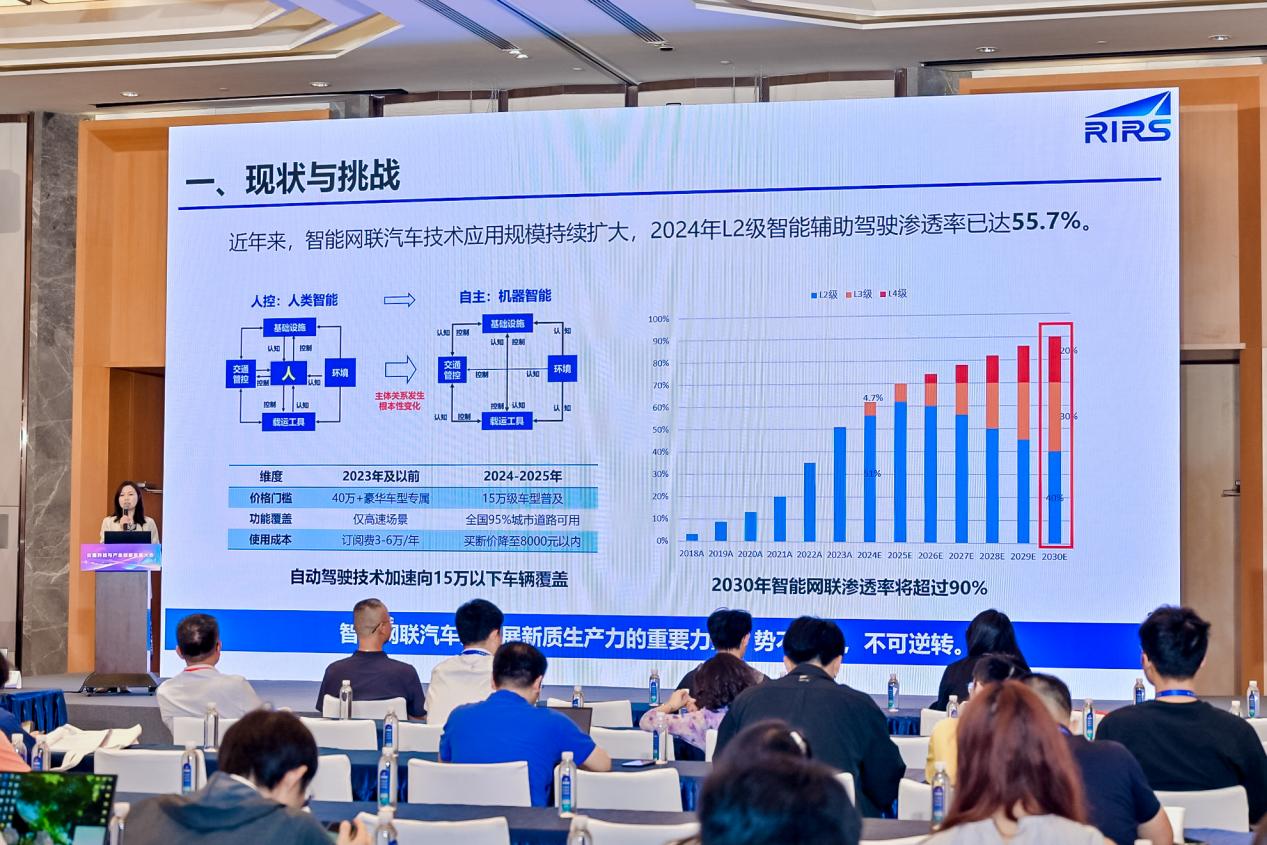
戴帅副主任系统梳理了我国智能网联汽车的发展趋势及安全管理面临的挑战,围绕“智能网联汽车交通安全管理技术及趋势”主题,提出未来构建智能网联汽车治理体系的关键路径和政策建议,为构建科学有效的安全管理模式提供了方向支撑。

蔡铭教授带来了“自主交通系统体系架构建模、验证及性能优化”的专题报告,系统阐述了“架构—功能—性能”一体化的自主交通系统设计范式,并围绕建模方法、验证机制和性能优化路径进行了深入剖析,推动自主系统理论与实践的融合发展。

孙剑教授围绕“自主式交通系统构建技术探索与实践”主题,深入剖析了自主式交通系统在开放道路环境下的关键技术体系与测试平台建设,结合国家重大研发项目成果,提出构建可扩展、可复用的技术路径,有力支撑复杂交通场景下的技术落地。


郑楠教授分享了“高等级自动驾驶关键场景辨识与干预行为分析”的最新研究成果,从“人在环”接管行为的角度出发,系统研究了高等级自动驾驶中关键场景的识别机制与安全性影响,为建立可靠的人机共驾体系提供了重要参考。


赵光明研究员以“自动驾驶车辆道路通行规定符合性测试技术创新及应用”为题,探讨了如何通过测试技术促进自动驾驶车辆对交通法规的适应与学习,展示了公安部在国家级试点项目中的最新实践与政策推动。


北京交通大学陈荣升博士围绕“自主式道路交通系统车辆交互机理建模与协同控制”进行了汇报,从混合交通环境出发,提出多类交通参与者之间的交互建模方法,并探索车辆协同控制技术,为自动驾驶技术与现实交通的融合发展提供理论基础。

本次论坛取得圆满成功,与会嘉宾热情高涨,现场座无虚席。论坛的成功举办,不仅搭建了自主式交通系统安全领域的专业交流平台,更在政策研究、标准制定和技术创新等方面形成了重要共识。展望未来,我们将持续打造高质量学术交流平台,共同推动智能交通领域的技术突破与产业升级。
