Moving Characteristics Analysis of Mixed Traffic Flow of CAVs and HVs around Accident Zones
英文题目:Moving Characteristics Analysis of Mixed Traffic Flow of CAVs and HVs around Accident Zones
中文题目:混合交通流中自动驾驶车辆与人工驾驶车辆在事故区域周边的运动特征分析
论文作者:景典,姚恩建,陈荣升
论文期刊:Physica A: Statistical Mechanics and its Applications
论文网址:https://www.sciencedirect.com/science/article/pii/S0378437123006404
摘要:随着V2V/V2I技术的出现,可以预见网联自动驾驶汽车(CAV)的市场渗透率将逐渐增加,深入分析CAV和HVs混合流的演化机制对于未来的研究至关重要。因此,本文提出了一种基于Kerner-Klenov-Wolf(KKW)模型的事故区周边改进的元胞自动机(CA)模型,用于描述混合交通流的移动特性。本文所提出的CA模型考虑了可变加速度和通行效用,与传统的对称双车道元胞自动机(STCA)相比能够更真实地模拟多车道场景中的换道行为。本文选取了具有合作自适应巡航控制(CACC)设备的不同渗透率车辆的混合流环境,模拟了事故周边的交通拥堵演化过程,并进行了灵敏度分析以测试不同参数的影响。结果表明,本文所提出的方法可以复现低速同步运动的混合流,随着CAV的增加,事故的影响可以有效减轻。
关键词:CACC,元胞自动机模型,交通流,交通瓶颈,交通事故
一、研究背景
交通拥堵对高速公路加剧了空气污染和燃油消耗。据统计,美国的通勤者每年平均要经历52小时的延误,导致约1210亿美元的损失[1]。解决这个问题可以从基础设施和车辆两个方面考虑。一些研究试图改进道路网络,并提供信息来指导驾驶员选择能够缩短旅行时间的路径。也有一些研究则试图根据邻近车辆的实时信息调整车辆的速度和轨迹。如今,互联和自动驾驶车辆(CAVs)的技术正在迅速发展,并被认为将对当前的交通系统产生深远影响。配备了V2X设备和自动驾驶技术的CAVs通过提高移动效率和减少燃油消耗的好处,这一点已经在现有的探索性研究中得到证实[2-4]。然而,由于高级自动驾驶技术和相关政策的复杂性,要实现完全自动驾驶车辆的高市场渗透率还需要几十年的时间。因此,在这个过程中,可以采用装备了自适应巡航控制(ACC)或合作自适应巡航控制(CACC)系统的车辆(称为ACC/CACC车辆),以在不久的将来实现初步的自动驾驶[5]。
随着ACC/CACC技术的出现和高速公路基础设施的发展,CAV和HV的混合交通流将逐渐占据高速公路。通过先进的无线通信技术,连接车辆之间可以共享实时速度、加速度、邻近车辆的位置和周围环境的数据。相比于人驾驶的车辆(HV),多种类型的信息能够实现精确和敏感的控制。然而,很少有研究关注分析HV和ACC/CACC车辆在多车道事故区域周围的混合流量,而这对于未来大规模采用CAV至关重要。了解事故引起的交通波及机制对于提高交通效率和缓解交通拥堵至关重要。因此,探索事故的演变和传播,以减轻拥堵并对事故进行科学处理是非常重要的。
许多研究已经对高速公路事故区域周边的混合流量演化进行了建模和分析,但仍有一些方面需要进一步研究。首先,现有研究广泛使用传统的Kerner-Klenov-Wolf(KKW)模型[6],但在事故情况下不适用,因为车辆在事故区域周围刹车更为频繁。其次,目前的横向控制策略主要是基于双车道变道模型,无法模拟多车道场景中的实际变道操作。第三,不同条件下事故对混合交通流的时空影响并不明确(如CACC渗透率、到达率、事故持续时间等)。
为了填补这些空白,我们对传统CA模型进行了改进,以更好地模拟事故区交通,并从宏观和微观角度分析了 ACC/CACC 车辆对事故区交通的影响。为实现上述目标,本文区分了HV和CAV的感知控制,然后建立纵向和横向运动模型,以描述不同类型车辆之间的竞争合作关系。本研究提出了一个改进的 KKW 模型,用于模拟不同交通需求和事故持续时间下交通拥堵的产生、传播和消散,并引入了可变加速度模型以提高驾驶安全性和舒适性,利用通行效用来确保车辆及时切换到畅通车道。本文基于所提出的方法,建立了一个仿真平台来测试所提模型的性能,并进行了敏感性分析以测试参数(变道概率、跟驰敏感系数和 CACC 车辆渗透率)的影响。
二、模型构建
由于Nasch模型无法在高密度场景中重现同步流现象,因此本文构建了一个多车道KKW模型来模拟交通流,包括纵向和横向运动模型。纵向运动模型包括HV运动模型和CAV运动模型,用于计算HV和CAV的纵向速度。HV运动模型描述了三种运动模式:自由运动、同步运动和随机化。CAV运动模型包括CACC控制模式和ACC控制模式。对于CAV来说,当前车是CAV时,该车辆采用CACC控制模式。当前车是HV时,CACC降级为ACC,该车辆采用ACC控制模式。横向运动模型用于控制车辆的变道动作。在横向运动模型中,车辆会根据每条车道的通行效用来决定是否变道到目标车道。多车道交通混合流场景如图1所示。
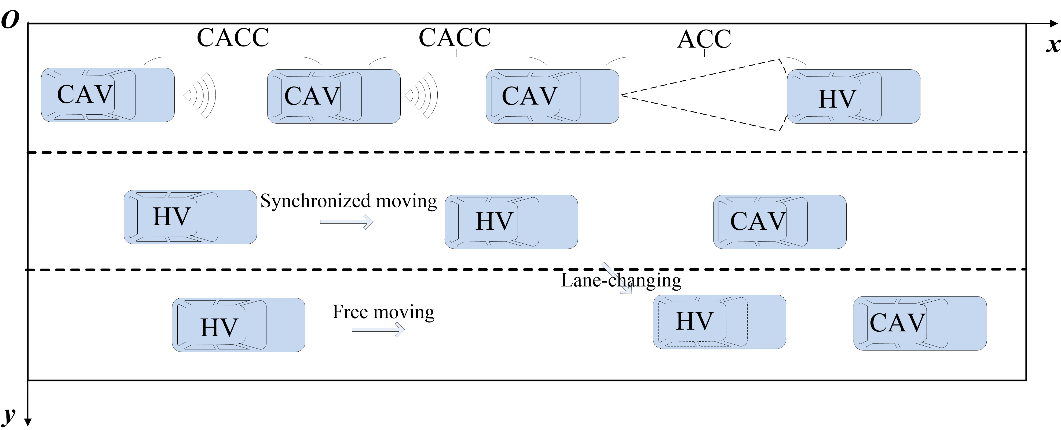
图 1. 多车道混合交通流演示。
我们使用二维坐标![]() 来描述车辆 n 在时间 t 时的位置,
来描述车辆 n 在时间 t 时的位置,![]() 表示小区索引,
表示小区索引,![]() 表示车道索引。下一时间步长 t +1 的位置更新规则可用公式 (1) 表示。
表示车道索引。下一时间步长 t +1 的位置更新规则可用公式 (1) 表示。
![]() (1)
(1)
其中,![]() 为车辆 n 在 t 时刻的纵向运动,
为车辆 n 在 t 时刻的纵向运动,![]() 为横向运动。在下面的章节中,我们将具体说明纵向和横向运动模型。
为横向运动。在下面的章节中,我们将具体说明纵向和横向运动模型。
纵向运动模型
1.HV运动模型
1)同步距离
在[26]的研究中,如果车辆n的跟车间距大于车辆n的同步距离,即![]() ,车辆有足够的空间自由行驶,不会受到前车的干扰。同步距离
,车辆有足够的空间自由行驶,不会受到前车的干扰。同步距离![]() 可以通过公式(2)计算。
可以通过公式(2)计算。
![]() (2)
(2)
其中l0表示最小车辆间距。ts是一个常数,可以解释为跟车敏感系数,当ts较高时,驾驶行为更为保守。vn表示第n辆车的速度。
Kerner的模型可以完美地模拟无事故情况。然而,在有事故情况下,车辆会减速并频繁刹车。现有研究中对安全刹车距离考虑不足。此外,减速度粗略计算为最大减速度,缺乏对驾驶舒适性的考虑。车辆至少需要与前车保持安全距离,即当跟车间距低于安全距离时,车辆将减速。因此,本研究将安全刹车距离纳入同步距离的计算中。最小刹车距离xb可以通过公式(3)计算。
![]() (3)
(3)
其中ade表示最大减速度,为正值。
此外,为了避免碰撞,如果前车以最大减速度刹车,主体车辆以当前速度行驶时所需的行驶距离可以通过公式(4)计算。这可以描述为一种靠近过程,即当主体车辆检测到前方车辆时,由于前车的行动(如刹车)不明确,它会保持最大安全距离以避免潜在碰撞。
![]() (4)
(4)
其中vn-1(t)表示时间步长t时前车的速度。
当主体车辆刹车时,紧急刹车距离可以通过公式(5)计算。
![]() (5)
(5)
其中tr是反应时间。
因此,同步距离![]() 可以表示为公式(6)。
可以表示为公式(6)。
![]() (6)
(6)
2)自由速度
当![]() ,车辆可以自由行驶和加速,同步距离被延伸为dn(t)。因此,第n辆车的加速度满足约束条件,即公式(7)。
,车辆可以自由行驶和加速,同步距离被延伸为dn(t)。因此,第n辆车的加速度满足约束条件,即公式(7)。
![]() (7)
(7)
其中![]() ,加速度可以表示为公式(8)。
,加速度可以表示为公式(8)。
![]() (8)
(8)
其中τ是代表时间间隔长度的常数。最大加速度受限于amax。
如前文中的公式(6)所述,需要满足如下三个条件:
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
3) 同步速度
当![]() , 第 n 辆车没有足够空间自由移动时,它会准备保持与前一辆车相同的速度。车辆 n 会尝试减速或制动,以再次恢复自由速度。
, 第 n 辆车没有足够空间自由移动时,它会准备保持与前一辆车相同的速度。车辆 n 会尝试减速或制动,以再次恢复自由速度。
要使速度与前一辆车保持一致,需要使用公式 (7),而减速则用公式 (12) 表示。
![]() (12)
(12)
因此,第 n 辆HV的速度可表示为公式 (13)。
![]() (13)
(13)
4) 随机化
如果第n辆车的速度大于限制速度,即![]() ,则该车辆可能以一定的概率随机减速。
,则该车辆可能以一定的概率随机减速。
假设随机速度服从均匀分布,速度的取值为整数。速度的取值集合可以表示为方程(14)。
![]() (14)
(14)
对于集合中的任意元素,被选中的概率等于1/|σ|,|σ|是集合σ的基数。
因此,随机速度可以表示为方程(15)。
![]() (15)
(15)
其中r1是一个随机数,![]() 。
。
2.CAV运动模型
1) CACC 控制模式
本研究采用基于间隙误差准则的CACC系统来描述CACC车辆的驾驶特性[42],可表示如下。
第 n 辆车的间隙误差可按公式 (16) 计算
式中,xn(t)和vn(t)为第 n 辆车在时间步长处的当前位置和速度,tc为两辆车之间的时间间隔。Xn-1(t)为前一辆车的位置。
间隙调节控制器的设计目标是最小化间隙误差并获得恒定的时间间隙跟随策略。因此,间隙误差en(t)及其导数![]() 用于确定速度,如式(17)所示。
用于确定速度,如式(17)所示。
![]() (17)
(17)
式中kp和kd是调整相对于前一辆车的时隙误差的系数。文献[42]中确定其值分别为 0.45 和 0.25。
2) ACC 控制模式
当 CACC 车辆无法获取前车信息时,CACC 控制模式会退化为 ACC 控制模式。ACC 控制模式在两种情况下启动:前车为HV或前车为 CAV但目标车辆与前车之间的间隙大于最大通信范围(本研究中为 100 米)。ACC控制模式中的时间间隙是恒定的,车辆的加速度和速度根据距离和速度误差建模,如式 (18)-(19) 所示。
![]() (18)
(18)
![]() (19)
(19)
式中,k1和k2分别为位置和速度误差的增益值。
b. 横向运动模型
定义一个集合![]() ,表示所有可行备选车道的索引。在集合 R 中,可以选择 m 条车道,包括当前车道。在计算转移到第 i 个车道的概率之前,先计算通行效用,并与其他车道的通行效用进行比较。然后利用通行效用计算换道至ri的概率。计算步骤如下。
,表示所有可行备选车道的索引。在集合 R 中,可以选择 m 条车道,包括当前车道。在计算转移到第 i 个车道的概率之前,先计算通行效用,并与其他车道的通行效用进行比较。然后利用通行效用计算换道至ri的概率。计算步骤如下。
步骤 1. 按公式 (19) 计算第 n 辆车转换到车道ri的通过效用sni。
![]() (20)
(20)
其中dni表示第 n 辆车变道至ri时与前一辆车的距离。![]() 表示第 n 辆车的同步距离,如公式 (2)-(6) 所述。
表示第 n 辆车的同步距离,如公式 (2)-(6) 所述。
步骤 2. 计算变道 i 的概率。
如果至少有一条车道的通过效用为正,则概率的计算公式为![]() ;否则为
;否则为![]() 。
。
式子![]() 可确保不会选择通过效用为负的车道 i。如果所有备选车道的通过效用都为负值,则可以选择任何车道。车辆 n 可以切换到间距较大的车道,并继续在目标车道上自由行驶。使用指数函数项是为了确保在所有通过效用都等于 0 的情况下可以计算出车道变换概率。
可确保不会选择通过效用为负的车道 i。如果所有备选车道的通过效用都为负值,则可以选择任何车道。车辆 n 可以切换到间距较大的车道,并继续在目标车道上自由行驶。使用指数函数项是为了确保在所有通过效用都等于 0 的情况下可以计算出车道变换概率。
步骤 3. 主导车道选择
车辆根据计算出的各车道概率选择主导车道。选择模式设计为轮盘赌,以建立选择概率与主导车道之间的映射。被选择的车道不一定是概率最大的车道,但概率较大的车道更容易被选择,如图 2 所示。
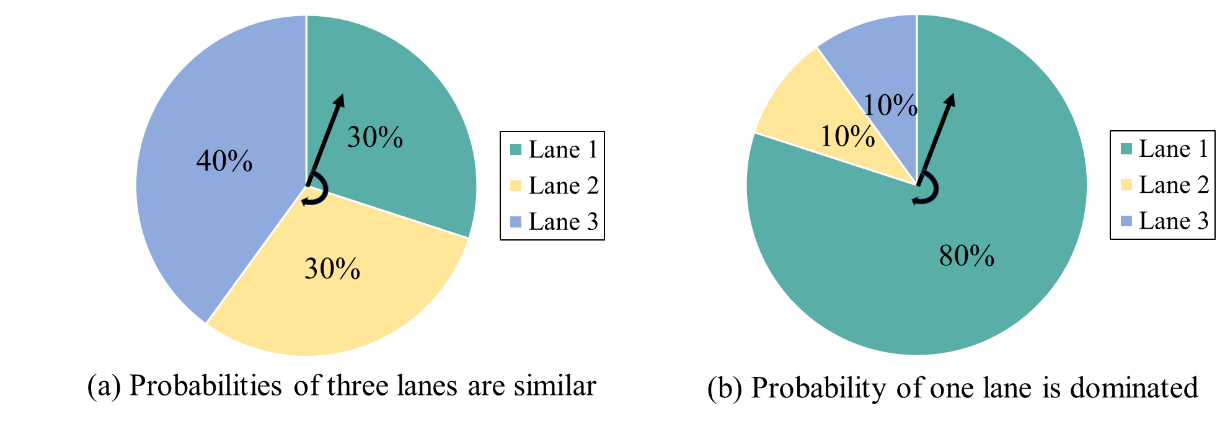
图 2. 轮盘赌法选择车道的示意图。
步骤 4. 计算变道意图
如果满足变道意图和安全条件,车辆可以变道。否则,车辆仍在当前车道上行驶。变道行为包括自行变道和强制变道。为了便于计算,我们引入了一个变道意图算子▽来决定车辆是否会改变当前车道。
1) 自由变道机动
如果前方没有障碍物,车辆将随机变道,变道概率可按公式(21)计算。
 (21)
(21)
其中![]() 为安全条件,表示如果与后车的距离大于后车的同步距离,则车辆可以变道。
为安全条件,表示如果与后车的距离大于后车的同步距离,则车辆可以变道。![]() 表示后车距离大于同步距离。r2为随机数,
表示后车距离大于同步距离。r2为随机数,![]() 。
。
2) 强制变道操作
如果车辆前方有障碍物,车辆将通过计算备选车道的概率变到没有障碍物的车道上。![]() 计算公式(22)为
计算公式(22)为
![]() (22)
(22)
步骤 5. 更新车道位置
由于车辆在一次变道动作中不能改变两条或两条以上的车道,因此我们假设车辆在一个时间步长内只能穿过一条车道。在时间 t,车辆 n 从当前车道到目标车道的变道决策计算公式为 (23)。
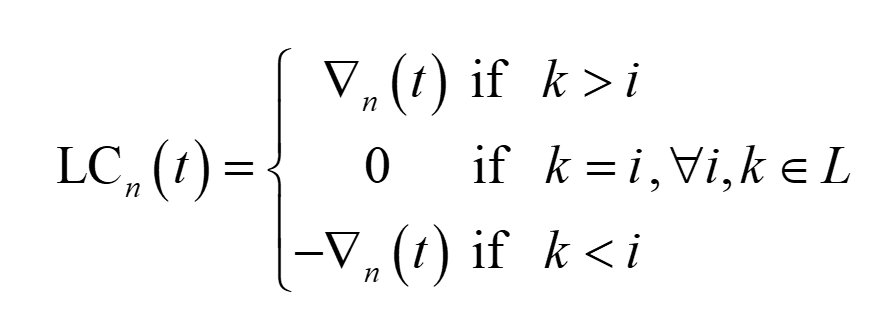 (23)
(23)
其中LCn=0表示车辆 n 继续在当前车道上行驶。LCn=-1表示车辆 n 在下一个时间步向上层车道行驶。LCn=1表示车辆 n 在下一个时间步向下层车道行驶。三、仿真结果
模拟场景描述
图 3 显示了模拟中使用的由三条车道组成的路段。事故发生在第一车道和第二车道,形成瓶颈,分为缓冲区、阻塞区和分流区。其余为无事故区。

图 3 事故区的划分。
在仿真中,单元大小设定为 0.5 米,路段长度为 6.5 公里(13000 个单元)。车辆长度设定为 6 米,相当于 12 个单元格。模拟持续 2100 秒,CACC 车辆的渗透率设定为 20%。我们在模拟中使用开放边界,并假设车辆的到达遵循泊松分布。其他参数见表 1。
表1 仿真参数设置
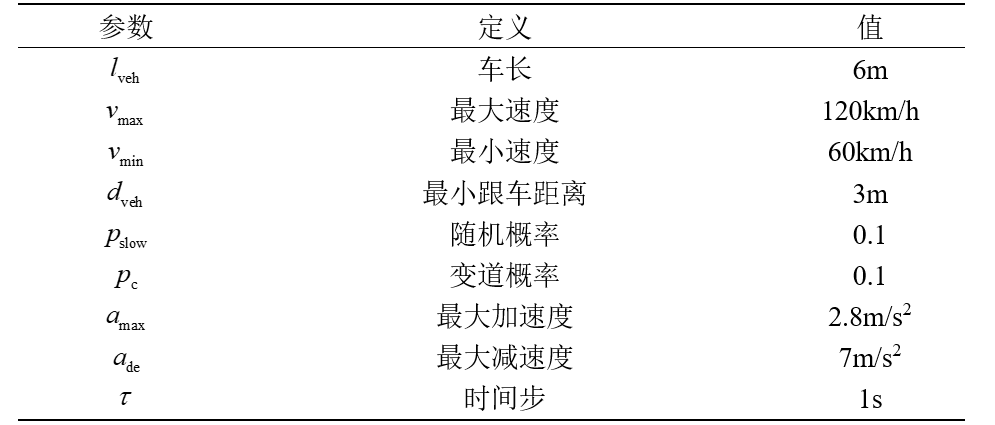
对事故区周围路段进行不同需求(低、中、高)的模拟,以测试交通需求对交通状况的影响。在每次模拟运行中,考虑了四个阶段以再现事故的实际过程(事故发生前、通行能力骤降、部分通行能力恢复和通行能力完全恢复),其中包括瓶颈处不同通行能力的情况。这些情景在每次模拟运行中依次出现,可通过堵塞两条车道、一条车道和无车道堵塞来设置。事故的严重程度决定了堵塞区的长度。在本模拟中,堵塞区占 400 个单元,位于模拟道路中第 8000 个单元的位置。 具体设置见表 2。
| 阶段1: 1-300s | 阶段2: 301-800s | 阶段3: 801-1300s | 阶段4: 1301-2100s |
λ=0.25veh/s | 无车道堵塞 | 车道1, 车道2 拥堵 | 车道1 拥堵 | 无车道堵塞 |
λ=0.5veh/s | 无车道堵塞 | 车道1, 车道2 拥堵 | 车道1 拥堵 | 无车道堵塞 |
λ=0.75veh/s | 无车道堵塞 | 车道1, 车道2 拥堵 | 车道1 拥堵 | 无车道堵塞 |
b.时空图
图 4 中的子图(a)、(c)和(e)是时空图。为了分析每条车道上平均速度和车辆数的变化,我们记录了这两个值,并将其绘制在子图 (b)、(d) 和 (f) 中。
子图(a)显示的是交通需求较低的情况。由于 1 号和 2 号车道堵塞,大多数车辆转向 3 号车道,导致堵塞位置(第 8000 个小区)的车辆密度高、拥堵严重。由于到达率较低,车道 3 并未受到严重影响,即在下游瓶颈处会出现一些断流,但堵塞很快就会消散。车道 3 吸引了车道 1 和车道 2 的部分车流。随着其他车道事故的排除,拥堵逐渐缓解。
在子图(b)中,第 1 和第 2 阶段的平均速度有所波动,随着瓶颈的消除,速度接近最大速度。车道 3 的速度变化很大,这是因为车道 1 和车道 2 的车辆频繁驶入车道 3,严重干扰了原本在车道 3 的车辆的正常行驶行为。根据提出的变道规则,每条车道上的累计车辆数少于 50 辆,且平均分布在三条车道上。
子图(c)显示了中等交通需求的情况。由于第 3 车道不足以容纳来自其他车道的车辆,从第 1 车道和第 2 车道变更到第 3 车道的车辆在第 2 阶段形成了约 500 米的拥堵区域。随着堵塞车道的重新开放,拥挤的车辆逐渐加速,拥堵区域的长度在第 3 阶段迅速缩短。拥堵区域处于低速流动状态,而不是拥堵状态。
子图(d)中,平均速度在第 2 阶段下降,在第 3 阶段上升。在第 4 阶段,平均速度恢复到自由流速度。在整个过程中,最低速度约为 60km/h。车辆数在第 2 阶段增加,随后减少;每条车道的累计车辆数少于 100 辆。
子图(e)显示的是交通需求量大的情况。在第 2 阶段,由于第 3 车道的容量不足,出现了与中等交通需求情况下相同的现象。拥堵在三条车道上蔓延,队列长度不断增加。由于 2 号车道畅通,被堵车辆可以加速,但两条车道的容量仍然不足,因此在第 3 阶段,拥堵区域的长度增加。在第 4 阶段,所有车道都畅通无阻,大量车辆开始移动,并出现起步波。拥堵区域出现大范围同步移动现象。同时,随着车辆到达队列尾部,拥堵波向后移动。
子图(f)中,三条车道的平均速度相似。由于 1 号车道距离畅通车道较远,车辆相对较难变道至 1 号车道,因此 1 号车道的车辆数量低于其他车道。平均速度恒定为 40km/h,最大车辆数小于 150 辆。
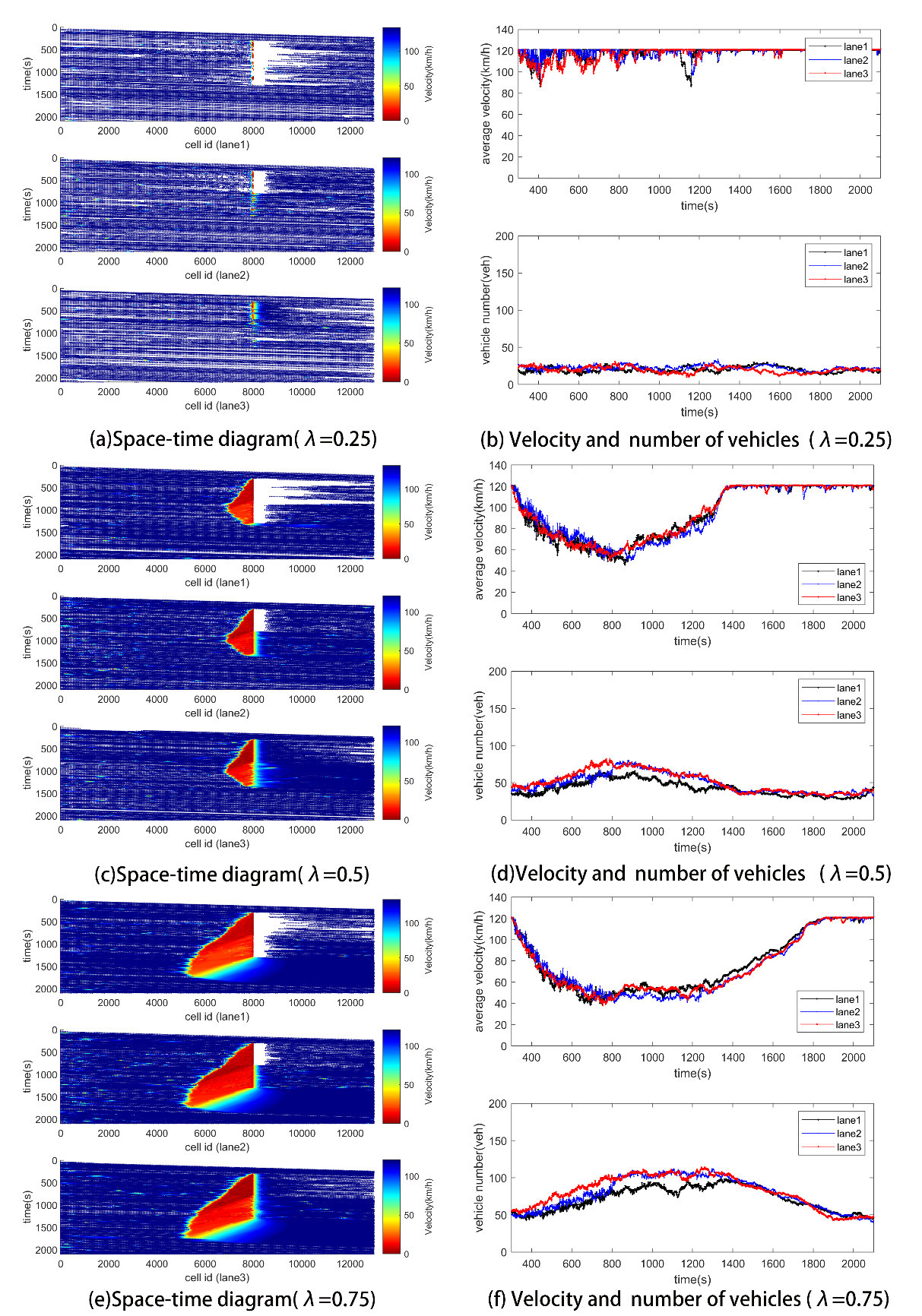
图4 每条车道上的时空、速度和车辆数量
为了分析HV与 CAV 的相互作用,我们模拟了 CAV 的不同渗透率,并在图 5 中绘制了时空图。图 5a 模拟了 0% 的情况,5b 模拟了 50% 的情况,5c 模拟了 100% 的情况。在子图(a)、(b)和(c)中,排队长度分别为 2000 米、1000 米和 500 米。出现这种现象是因为 CAV 可以改善车辆之间的合作,从而有效缓解拥堵并减少事故影响。
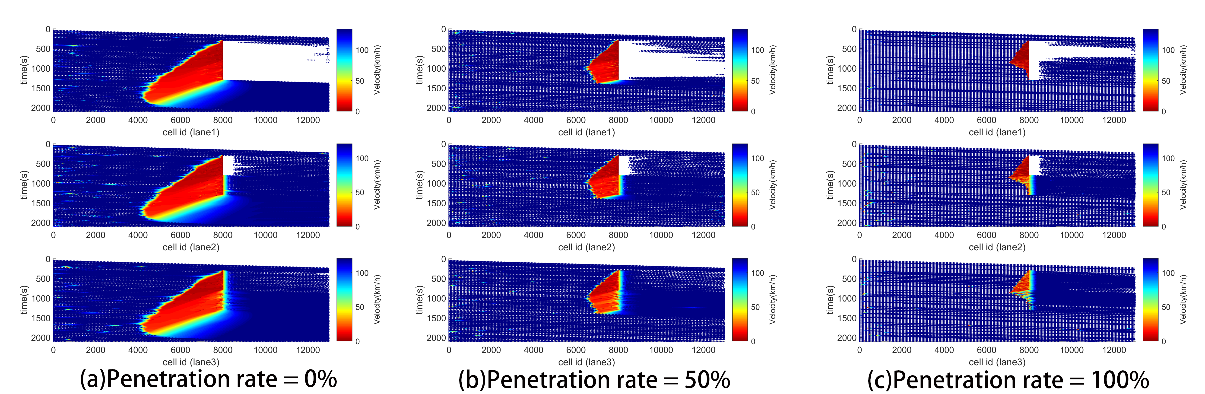
图5 不同 CACC 车辆渗透率下的时空图
c.变道规则比较
为了比较通行效用LC规则和STCA规则的性能,我们基于两种LC规则模拟高密度场景。其中一个场景使用了前面章节提出的通行效用LC规则,另一个使用了STCA的LC规则。当方程 (24)-(26) 中的以下条件同时满足时,车辆可以变更到行驶条件优于当前车道的车道。
![]() (24)
(24)
![]() (25)
(25)
![]() (26)
(26)
式中,dsafe为变道时的最小安全距离。
各车道的时空图如图 6 所示。
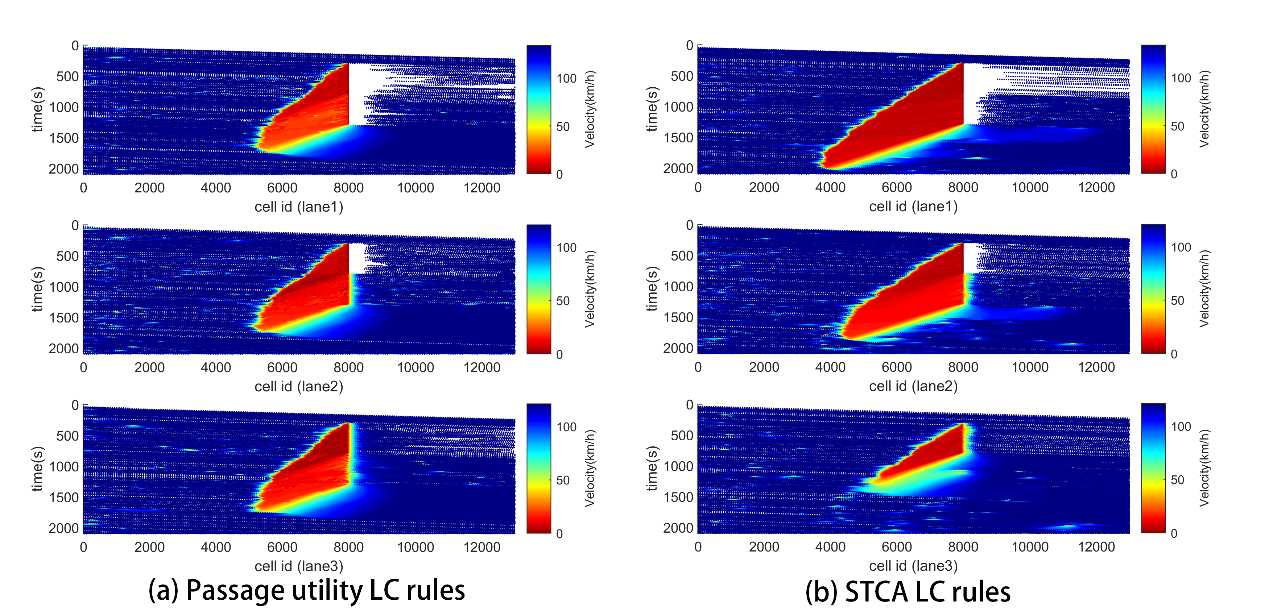
图 6. 基于两种 LC 规则的各车道时空图
在图 6a 中,基于通行效用 LC 规则的队列最大长度为 1750 米,而图 6b 中基于 STCA LC 规则的队列最大长度为 2000 米。对比两个子图,根据建议的 LC 规则,队列长度更短,分布更均匀。主要原因是建议的 LC 规则扩大了驾驶员的视线,增加了变道机会。比较结果表明,通行效用 LC 规则能够更真实地描述 LC 机动性。
d.CAV的速度特征
驾驶特性(包括速度、加速度和混合流编队的时间间隔)被观测和收集,以捕捉移动细节并测试CACC控制器的性能。编队包括一辆前导ACC车辆和五辆后续CACC车辆,并且模拟持续了350秒。前导车辆在50秒、140秒和220秒时刻刹车。每次刹车的减速度为-0.5m/s²,最大减速度限制为2.8m/s²。模拟结束后,我们记录了驾驶特性的数据,如图7所示。
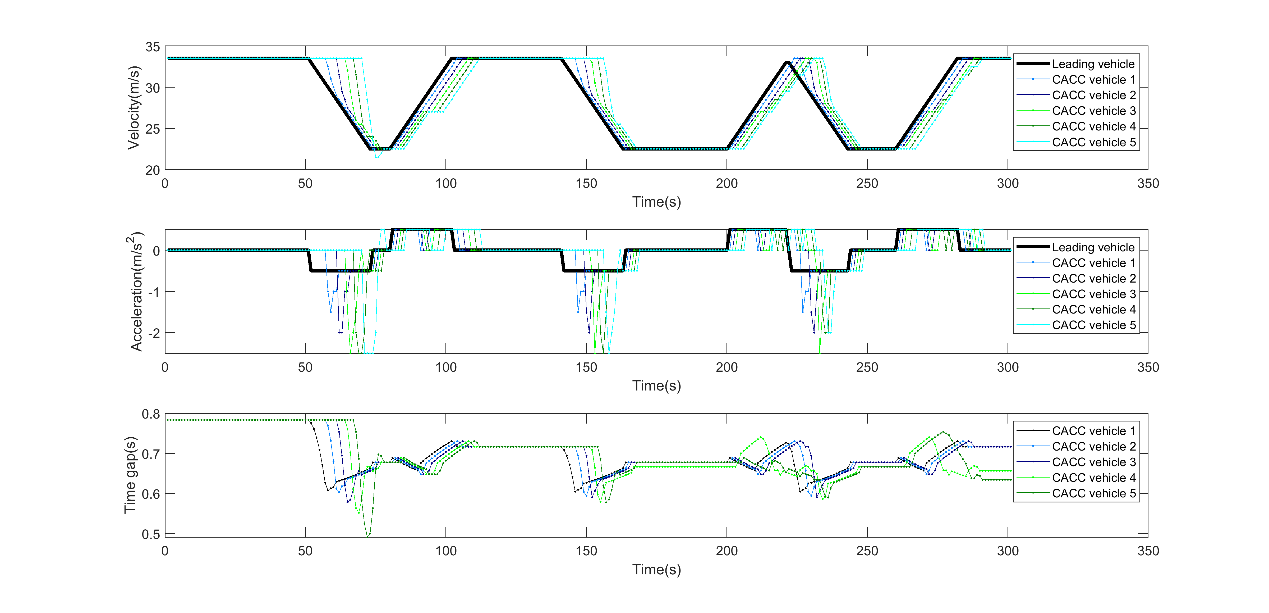
图7 六辆连续车辆(一辆前导ACC车辆和五辆后续CACC车辆)的速度、加速度和时间间隔变化曲线
如图7所示,CACC车辆的速度、加速度和时间间隔数值随前导车辆而变化。预期的时间间隔维持在大约0.71左右,这表明CACC系统能够有效地控制车辆。CACC车辆的驾驶特性变化滞后于前导车辆,与Milanes等人的研究(2014)一致。
四、总结
本文研究了由高速公路事故引起的瓶颈处自动驾驶车辆和人工驾驶车辆的混合流演化和相互作用。为了更真实地再现混合流,本文基于三相交通流理论提出了改进的KKW模型。在该模型中,车辆的加速度/减速度随周围车辆的速度和位置而变化,同时引入通行效用来计算换道概率并模拟多车道换道动作。本文所提出的换道模型修复了在两车道换道规则下车辆无法及时换到畅通车道的问题,更真实地描绘了换道动作。
随后,基于所提出的模型进行模拟,使用不同的交通需求(低、中、高)来再现瓶颈周围的交通拥堵过程(生成、传播和消失),通过多种事故场景的模拟来分析不同影响因素的影响。结果表明,所提出的模型可以模拟与现有研究中的理论推导相对应的同步流和激波移动。
从模拟结果中得出的主要结论可以总结如下。1)在密度低于临界密度时可以实施禁止换道策略。但在高密度情况下实施效果较差。2)如果驾驶员更加谨慎或者车辆间距限制增加,道路容量将显著降低。3)CACC车辆可以提高事故区的容量并缓解事故区域周围的拥堵。在未来的研究中,可以模拟更多类型的事故场景来研究混合流的特性,此外还可以基于所提出的框架应用和测试实际建议或控制策略(如可变限速)。
参考文献
[1] Schrank D, Eisele B, Lomax T. 2021 Urban Mobility Report. Texas A&M Transportation Institute 2021.
[2] Vahidi A, Sciarretta A. Energy saving potentials of connected and automated vehicles. Transp Res Part C Emerg Technol 2018;95. https://doi.org/10.1016/j.trc.2018.09.001.
[3] Chen Z, He F, Yin Y, Du Y. Optimal design of autonomous vehicle zones in transportation networks. Transportation Research Part B: Methodological 2017;99. https://doi.org/10.1016/j.trb.2016.12.021.
[4] Wu W, Liu Y, Hao W, Giannopoulos GA, Byon YJ. Autonomous intersection management with pedestrians crossing. Transp Res Part C Emerg Technol 2022;135. https://doi.org/10.1016/j.trc.2021.103521.
[5] Zhou YJ, Zhu HB, Guo MM, Zhou JL. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow. Physica A: Statistical Mechanics and Its Applications 2020;540:122721. https://doi.org/10.1016/j.physa.2019.122721.
[6] Kerner BS. Three-phase traffic theory and highway capacity. Physica A: Statistical Mechanics and Its Applications 2004;333. https://doi.org/10.1016/j.physa.2003.10.017.
[7] Richards PI. Shock Waves on the Highway. Oper Res 1956;4:42–51. https://doi.org/10.1287/opre.4.1.42.
[8] Herman R, Lam T, Prigogine I. KINETIC THEORY OF VEHICULAR TRAFFIC: COMPARISON WITH DATA. Transportation Science 1972;6:440–52. https://doi.org/10.1287/trsc.6.4.440.
[9] Pipes LA. Car following models and the fundamental diagram of road traffic. Transportation Research 1967;1. https://doi.org/10.1016/0041-1647(67)90092-5.
[10] Schadschneider A. Cellular automata models of highway traffic. Physica A: Statistical Mechanics and Its Applications 2006;372:142–50. https://doi.org/10.1016/j.physa.2006.05.011.
[11] Cremer M, Ludwig J. A fast simulation model for traffic flow on the basis of boolean operations. Math Comput Simul 1986;28:297–303. https://doi.org/10.1016/0378-4754(86)90051-0.
[12] Nagel K, Schreckenberg M. A cellular automaton model for freeway traffic. Journal de Physique I 1992;2. https://doi.org/10.1051/jp1:1992277.
[13] Barlovic R, Santen L, Schadschneider A, Schreckenberg M. Metastable states in cellular automata for traffic flow. European Physical Journal B 1998;5:793–800. https://doi.org/10.1007/s100510050504.
[14] Li X, Wu Q, Jiang R. Cellular automaton model considering the velocity effect of a car on the successive car. Phys Rev E Stat Phys Plasmas Fluids Relat Interdiscip Topics 2001;64:4. https://doi.org/10.1103/PhysRevE.64.066128.
[15] Jiang R, Hu M bin, Zhang HM, Gao ZY, Jia B, Wu QS. On some experimental features of car-following behavior and how to model them. Transportation Research Part B: Methodological 2015;80. https://doi.org/10.1016/j.trb.2015.08.003.
[16] Zamith M, Leal-Toledo RCP, Kischinhevsky M, Clua E, Brandão D, Montenegro A, et al. A probabilistic cellular automata model for highway traffic simulation. Procedia Comput Sci, vol. 1, Elsevier B.V.; 2010, p. 337–45. https://doi.org/10.1016/j.procs.2010.04.037.
[17] Guzmán HA, Lárraga ME, Alvarez-Icaza L, Carvajal J. A cellular automata model for traffic flow based on kinetics theory, vehicles capabilities and driver reactions. Physica A: Statistical Mechanics and Its Applications 2018;491:528–48. https://doi.org/10.1016/j.physa.2017.09.094.
[18] Kong D, Guo X, Wu D. The influence of heavy vehicles on traffic dynamics around on-ramp system: Cellular automata approach. International Journal of Modern Physics C 2017;28. https://doi.org/10.1142/S0129183117500838.
[19] Kong D, Sun L, Li J, Xu Y. Modeling cars and trucks in the heterogeneous traffic based on car–truck combination effect using cellular automata. Physica A: Statistical Mechanics and Its Applications 2021;562. https://doi.org/10.1016/j.physa.2020.125329.
[20] Kerner BS. Experimental features of self-organization in traffic flow. Phys Rev Lett 1998;81. https://doi.org/10.1103/PhysRevLett.81.3797.
[21] Kerner BS. Congested traffic flow: Observations and theory. Transp Res Rec 1999. https://doi.org/10.3141/1678-20.
[22] Kerner BS. Experimental features of the emergence of moving jams in free traffic flow. J Phys A Math Gen 2000;33. https://doi.org/10.1088/0305-4470/33/26/101.
[23] Kerner BS. Theory of breakdown phenomenon at highway bottlenecks. Transp Res Rec 2000. https://doi.org/10.3141/1710-16.
[24] Kerner BS. Empirical features of congested patterns at highway bottlenecks. Transp Res Rec 2002. https://doi.org/10.3141/1802-17.
[25] Kerner BS. Synchronized flow as a new traffic phase and related problems for traffic flow modelling. Math Comput Model 2002;35. https://doi.org/10.1016/S0895-7177(02)80017-6.
[26] Kerner BS, Klenov SL, Wolf DE. Cellular automata approach to three-phase traffic theory. J Phys A Math Gen 2002;35:9971–10013. https://doi.org/10.1088/0305-4470/35/47/303.
[27] Kerner BS. Statistical physics of synchronized traffic flow: Spatiotemporal competition between S→F and S→J instabilities. Phys Rev E 2019;100. https://doi.org/10.1103/PhysRevE.100.012303.
[28] Hu X, Zhang F, Lu J, Liu M, Ma Y, Wan Q. Research on influence of sun glare in urban tunnels based on cellular automaton model in the framework of Kerner’s three-phase traffic theory. Physica A: Statistical Mechanics and Its Applications 2019;527. https://doi.org/10.1016/j.physa.2019.121176.
[29] Lyu Z, Hu X, Zhang F, Liu T, Cui Z. Heterogeneous traffic flow characteristics on the highway with a climbing lane under different truck percentages: The framework of Kerner’s three-phase traffic theory. Physica A: Statistical Mechanics and Its Applications 2022;587. https://doi.org/10.1016/j.physa.2021.126471.
[30] Yang L, Zheng J, Cheng Y, Ran B. An asymmetric cellular automata model for heterogeneous traffic flow on freeways with a climbing lane. Physica A: Statistical Mechanics and Its Applications 2019;535:122277. https://doi.org/10.1016/J.PHYSA.2019.122277.
[31] Hrabák P, Porzycki J, Bukáček M, Lubaś R, Was J. Advanced CA crowd models of multiple consecutive bottlenecks. Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) 2016;9863 LNCS. https://doi.org/10.1007/978-3-319-44365-2_39.
[32] Sun S, An X, Zhao J, Li P, Shao H. Modeling and Simulation of Lane-Changing Management Strategies at On-Ramp and Off-Ramp Pair Areas Based on Cellular Automaton. IEEE Access 2021;9. https://doi.org/10.1109/ACCESS.2021.3062939.
[33] Yang H, Zhai X, Zheng C. Effects of variable speed limits on traffic operation characteristics and environmental impacts under car-following scenarios: Simulations in the framework of Kerner’s three-phase traffic theory. Physica A: Statistical Mechanics and Its Applications 2018;509. https://doi.org/10.1016/j.physa.2018.05.032.
[34] Zhang F, Lu J, Hu X, Hao X. Investigating safety impact of sun glare in urban tunnels based on cellular automata approach. Accid Anal Prev 2020;148:105821. https://doi.org/10.1016/j.aap.2020.105821.
[35] Li X, Xiao Y, Jia B, Li X. Modeling mechanical restriction differences between car and heavy truck in two-lane cellular automata traffic flow model. Physica A: Statistical Mechanics and Its Applications 2016;451. https://doi.org/10.1016/j.physa.2015.12.157.
[36] Qian YS, Feng X, Zeng JW. A cellular automata traffic flow model for three-phase theory. Physica A: Statistical Mechanics and Its Applications 2017;479. https://doi.org/10.1016/j.physa.2017.02.057.
[37] Zeng J, Qian Y, Lv Z, Yin F, Zhu L, Zhang Y, et al. Expressway traffic flow under the combined bottleneck of accident and on-ramp in framework of Kerner’s three-phase traffic theory. Physica A: Statistical Mechanics and Its Applications 2021;574:125918. https://doi.org/10.1016/j.physa.2021.125918.
[38] Kerner BS. Effect of autonomous driving on traffic breakdown in mixed traffic flow: A comparison of classical ACC with three-traffic-phase-ACC (TPACC). Physica A: Statistical Mechanics and Its Applications 2021;562:125315. https://doi.org/10.1016/j.physa.2020.125315.
[39] Zhou S, Ling S, Zhu C, Tian J. Cellular automaton model with the multi-anticipative effect to reproduce the empirical findings of Kerner’s three-phase traffic theory. Physica A: Statistical Mechanics and Its Applications 2022;596:127162. https://doi.org/10.1016/J.PHYSA.2022.127162.
[40] Zeng J, Qian Y, Mi P, Zhang C, Yin F, Zhu L, et al. Freeway traffic flow cellular automata model based on mean velocity feedback. Physica A: Statistical Mechanics and Its Applications 2021;562:125387. https://doi.org/10.1016/J.PHYSA.2020.125387.
[41] Vranken T, Sliwa B, Wietfeld C, Schreckenberg M. Adapting a cellular automata model to describe heterogeneous traffic with human-driven, automated, and communicating automated vehicles. Physica A: Statistical Mechanics and Its Applications 2021;570. https://doi.org/10.1016/j.physa.2021.125792.
[42] Milanés V, Shladover SE. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp Res Part C Emerg Technol 2014;48:285–300. https://doi.org/10.1016/j.trc.2014.09.001.
[43] Nowakowski C, O’Connell J, Shladover SE, Cody D. Cooperative Adaptive Cruise Control: Driver Acceptance of Following Gap Settings Less than One Second. Proceedings of the Human Factors and Ergonomics Society Annual Meeting 2010;54. https://doi.org/10.1177/154193121005402403.
[44] Milanes V, Shladover SE, Spring J, Nowakowski C, Kawazoe H, Nakamura M. Cooperative adaptive cruise control in real traffic situations. IEEE Transactions on Intelligent Transportation Systems 2014;15:296–305. https://doi.org/10.1109/TITS.2013.2278494.